휠체어 전동화 프로젝트 - 휠체어 이송 로봇(1)
카테고리: Mecanum
태그: Capstone
wheel-driven non-holonomic wheeled vehicle system
프로젝트 개요
본 프로젝트는 한국보건산업진흥원으로부터 연구과제를 수주하여 병원 내에서 휠체어를 이송하는 로봇을 개발하는 프로젝트이다.

프로젝트의 최종적인 목표는 병원 내에서 휠체어를 이송할 수 있는 플랫폼을 개발하는 것이다.
따라서 프로젝트의 진행상황과 디버깅 과정을 포스팅하고자 한다.
기존 제품 조사
Max Mobillity - Smart drive

Smart drive는 수동 휠체어 후부에 장착되는 주행 보조 구동장치로 기존 휠체어에 add-on 형태로 장착되는 장치라는 점에서 본 프로젝트의 지향점과 방향이 같다.
구동륜은 omni-wheel을 채택하고 있어 바퀴 회전방향 외 측면방향으로의 자유로운 회전이 보장된다.
주행 보조로봇답게 휠체어 탑승자가 초기에 휠체어 바퀴를 굴리면 굴린 속도만큼 최종속도가 결정되며, 사용자가 기존 휠체어의 메인 바퀴 중 하나를 잡아 회전속도를 낮춤으로써 조향하게 된다.
Smart drive는 단 한 개의 구동륜을 가지는 점과 수동 휠체어에 add-on 형태로 전동화를 달성할 수 있다는 점에서 장점을 가지나, 탈부착이 까다로운 점과 수동 조향특성을 가진다는 점이 단점이다.
Todo works – Todo drive

Todo drive는 국내 스타트업에서 생산하는 수동휠체어 전동화 솔루션으로, 기존 휠체어의 앞바퀴를 분리하고 총중량 5kg의 경량 모듈들을 부착하여 전동화를 달성하였다.
주 바퀴 양쪽에 모터가 달린 작은 바퀴를 접지시킨 후 두 바퀴 간 마찰력을 이용해 주 바퀴에 동력을 제공하며, 바퀴 간 회전수를 제어하여 조향한다.
그러나 탈부착 매커니즘이 복잡하여 환자가 직접 탈부착을 할 수 없는 병원 환경에 사용하기에는 부적합한 방식이다.
또한 Todo drive는 독립적인 주행이 불가능 하기 때문에 전동화를 위해선 휠체어에 종속된다는 문제점이 있다.
휠체어 이송 로봇 1차 설계
설계 조건
위 기존 사례연구들을 통해 병원 환경에 최적화된 휠체어 이송 로봇의 설계는 다음 조건을 따라야한다.
- 병원 내 휠체어 인프라는 그대로 유지해야 함
- 환자의 편의를 위해 탈부착이 용이해야 함
- 휠체어 탈착 및 결합 모든 상황에서도 로봇이 독립적으로 주행할 수 있어야 함
- 병원 내에서 기동성을 확보하기 위한 주행 자유도가 확보되어야 함
H/W 설계
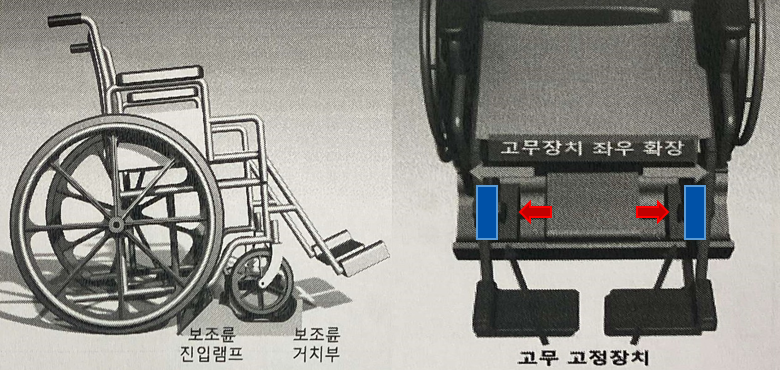
위 설계 조건 중 1,2번 조건을 만족하기 위해서 휠체어의 앞바퀴에 해당하는 보조전륜만이 로봇에 결합하여 전동화되는 형상으로 설계 하였다.
휠체어의 보조전륜과 로봇사이의 안정적인 결합을 보장하기 위해서 Linear actuator를 부착하였다.
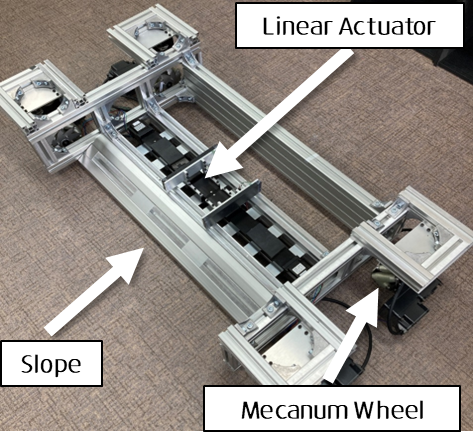
하드웨어의 1차 프로토타입은 위 그림과 같고, 그림에서 볼 수 있듯이 휠체어가 경사를 통해 로봇에 탑승한 후 Linear actuator가 휠체어와 로봇을 결합하게 된다.
로봇의 구동부에 해당하는 4개의 바퀴는 Mecanum wheel이라는 특수한 바퀴를 사용하였는데, 이에 대해서 설명해보고자 한다.
댓글남기기